TinyHawk II Race BNF - Manual
https://drive.google.com/open?id=1Xrb3-LZn1kTq_7FMtTuRLdRNUjl0p5XQ
TinyHawk II Race BNF - Firmware
Use target MatekF411RX version 4.1.0. If you are using an older E6 Transmitter and are having trouble binding, please use the following custom version of MatekF411RX 4.1.0:
https://drive.google.com/open?id=1ziLocXx8Be3YSkYB4V_Rv69DPcizBNFh
TinyHawk II Race BNF - CLI
https://drive.google.com/open?id=1gMiz5UboiIqsKeKvNqnA64ztwfJm2Dqu
*Please note that even if you unlocked the video transmitter (VTX) per the manual and are changing power levels via the OSD/Smart Audio (VTX SA), the Race is set to stay at 25mW until you arm the motors.
-----------------------------------
DETAILED INSTRUCTIONS
1. Download/Install
For full compatibility with the firmware on your drone, do NOT use other versions of Configurator.
2. Connecting Drone
Connect the drone to computer via USB data cable (some are power/charging only). Open Betaflight Configurator by clicking Connect. (Don't worry about which COM port number your computer chooses for you.)
3a. Flash Stock Firmware (OPTION 1 - Should work for most setups.)
Click the Update Firmware button in Configurator, and select MatekF411RX (MTKS) target version 4.1.0 from the drop-down menus. Then click Load Firmware [Online]. Click Flash Firmware. (If you encounter some error: please unplug the USB cable, plug it back in, and then click Flash Firmware again.)
*Important: After reconnecting to the Configurator, there will be a pop-up Notice window that asks if you want to apply the custom defaults for this board. Please select Apply Custom Defaults.
3b. Flash Custom Firmware (OPTION 2 - Try this if using an older generation E6 Transmitter and first method cannot bind.)
Download custom MatekF411RX 4.1.0 firmware (filename "EMAX_Custom_Betaflight_4.1.0_MATEKF411RX.hex") and save it to your desktop.
Connect drone to computer via USB data cable (some are power/charging only). Open Betaflight Configurator. Click Update Firmware. Click Load Firmware [Local]. Select the firmware you downloaded. Click Flash Firmware. (If you encounter some error: please unplug the USB cable, plug it back in, and then click Flash Firmware again.)
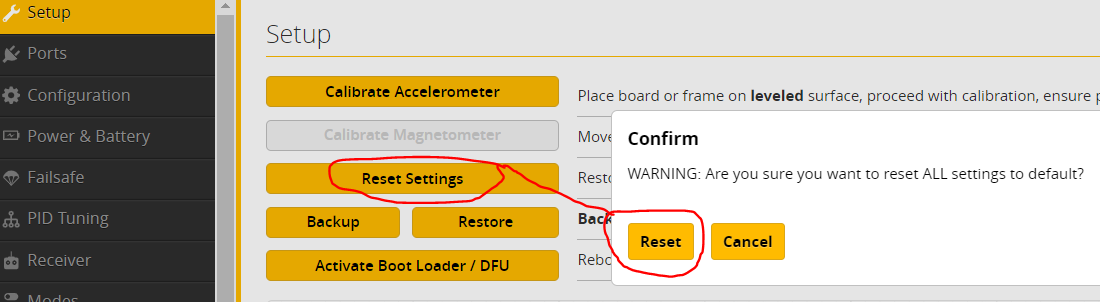
*Important: After reconnecting to the Configurator, there will NOT be a pop-up Notice window that asks if you want to apply the custom defaults for this board. Rather, you will need to go into the Setup tab and click the Reset Settings button, and then click the Reset button in the corresponding pop-up window. Re-Connect to Configurator.
4. CLI Settings
Open the CLI dump linked below. You can also download/save the text file to your desktop. Select/highlight all of the text within the document and "copy" it (i.e. right-click the highlighted text and select "copy" from your computer's menu).
TinyHawk II Race CLI MATEKF411RX (MTKS) 4.1.0 BNF (Generally the one to use, especially with your own FrSky D8 transmitter)
https://drive.google.com/open?id=1gMiz5UboiIqsKeKvNqnA64ztwfJm2Dqu
Click the CLI tab in the left-hand column. Right-click on the command line (e.g. "Write your command here"), and select "paste" from your computer's menu. Then press "enter" on your keyboard. The settings should load and save. (Don't worry if you get some kind of serial device error, as it's a known bug which doesn't affect anything.) Disconnect your drone from the USB cable.
*Important: After using the custom hex/firmware from step 3b, please disregard the CLI errors. Please manually type in "save" (no quotation marks) and press Enter on your keyboard. Also, manually finish setting up the channel mapping and mode switches by following the steps here: https://emaxusa2.freshdesk.com/a/solutions/articles/19000109633
5. Binding Drone
Standard Method - Plug charged lipo batteries to the drone. The next step is easier if the battery is hanging free, out of the battery strap. Using a non-metallic object, hold the Bind button on the bottom of the main board for several seconds. There is a small hole in the carbon baseplate for this exact purpose. Bind your radio transmitter in D8 mode. Keep the transmitter at least 5 feet away from the drone to allow for proper binding. Unplug the lipo battery from the drone. Turn off the transmitter.
-----------------------------------
Please note that the TinyHawk II Race is only specified for use on D8. However, you may choose to use the following if forced to bind in D16 (i.e. newer ACCESS-based FrSky radios, but with ACCST16 firmware updated). Note that you may encounter receiver/failsafe issues, and this method is not supported or guaranteed to work. Warranty does not apply when using this method.
CLI Method - First, change the receiver protocol in the Configurations tab of Betaflight to SPI-based receiver, Frsky_X protocol (which is for D16; the default is Frsky_D for D8). Next, try using CLI commands to bind. Enter into the CLI, "bind_rx" (for 4.1.x firmware) to get into binding mode. Activate the bind function in the transmitter in D16 protocol. The drone's LED's may not change back to blinking, but continue. Then enter into the CLI, "set frsky_x_rx_num". If the rx/receiver number changed to the number that matches the receiver number shown on your transmitter, then the bind was successful. Finally, enter into the CLI, "save".






